top of page
研究動機
模型套用至樹梅派並
進行模擬環境偵測
在找到最佳的訓練模型後,我們下一步便是先將樹莓派的環境架設好,並且實際搭配樹梅派的相機模組搭配猴子海報進行模擬環境測試,在偵測到猴子時也會同時將猴子的座標進行輸出。

研究動機
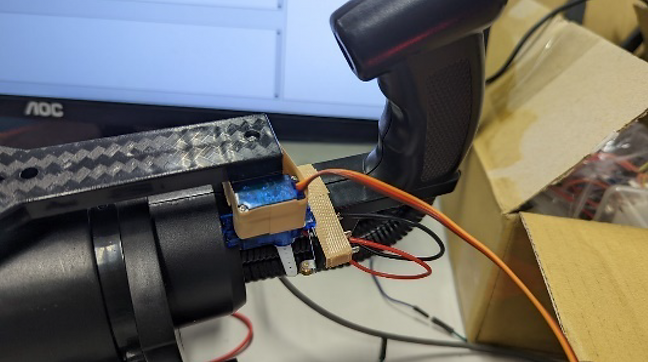
樹莓派搭載伺服馬達進行模擬瞄準-
伺服馬達控制之方波訊號及角度的換算調整
在經過實際的測試調整後,我們可得知MG995在轉向中心之電器訊號數值。
以此為基礎,當得到猴子座標後將座標換算成伺服馬達要轉到的絕對角度,再轉換成方波訊號來操控馬達。
樹莓派搭載伺服馬達進行模擬瞄準-
結合影像辨識並使馬達進行模擬瞄準
在此模擬中我們先不架設水彈槍而是以箭頭來模擬水彈槍瞄準方向,圖為模擬瞄準示意圖
樹莓派搭載伺服馬達進行模擬瞄準-
加入預防誤傷行人安全機制
我們在最終的訓練模型中加入人類的類別,因此在影像辨識中可同時偵測到是否有人出現在即時影像中如圖,而我們也在瞄準射擊的程式碼間插入一段程式碼:當偵測到有人時會強制中斷停止瞄準射擊的動作。


研究動機
水彈槍及樹莓派的連結
在經過拆解水彈槍後我們發現控制水彈槍發射的是最基本的按鈕,但考慮到按鈕本身按壓面積太小不易操控,因此我們換成微動開關並使用透過樹莓派操控的小型舵機來按壓開關
研究動機
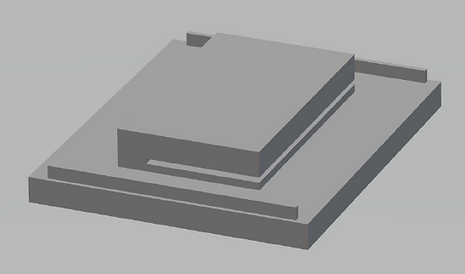
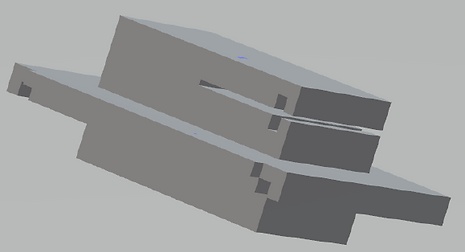
製作機殼以固定馬達、水彈槍
為了將馬達與水彈槍固定,我們以solidwork畫出連結的結構並且以PLA材質用3D列印機列印出來,設計圖如圖
研究動機
成品
最後將連結機構與馬達連接固定後並與樹梅派作連結的結果

bottom of page